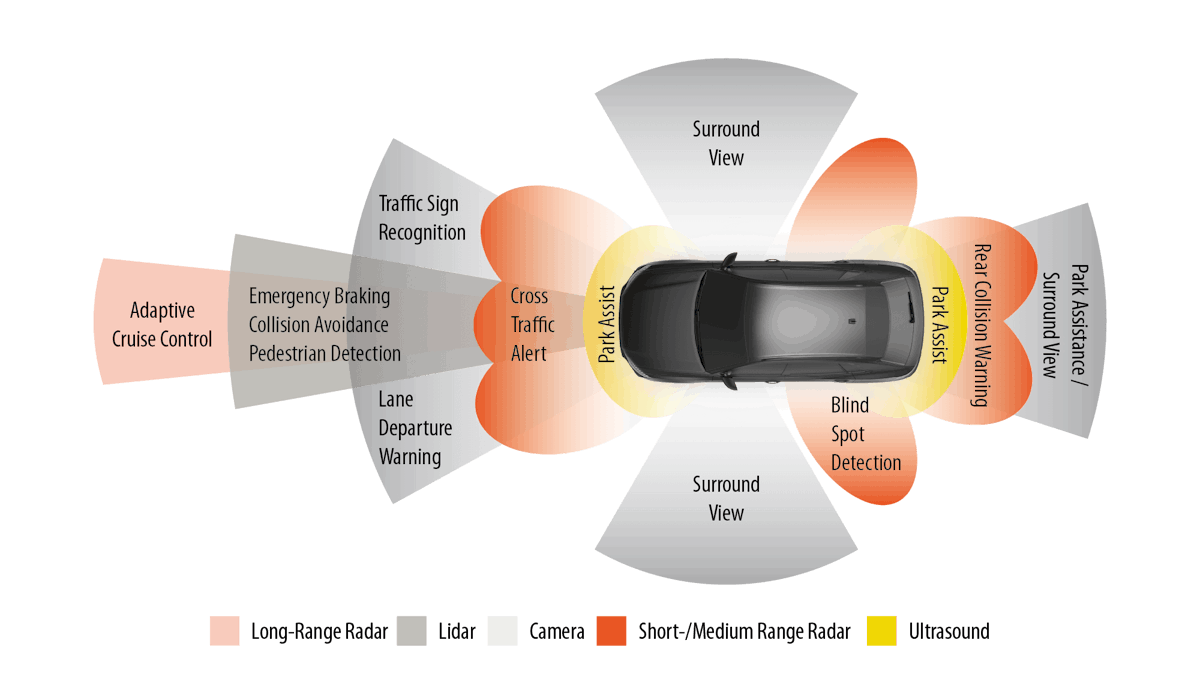
Mỗi cảm biến được sử dụng trong xe ADAS đều có điểm mạnh và điểm yếu:
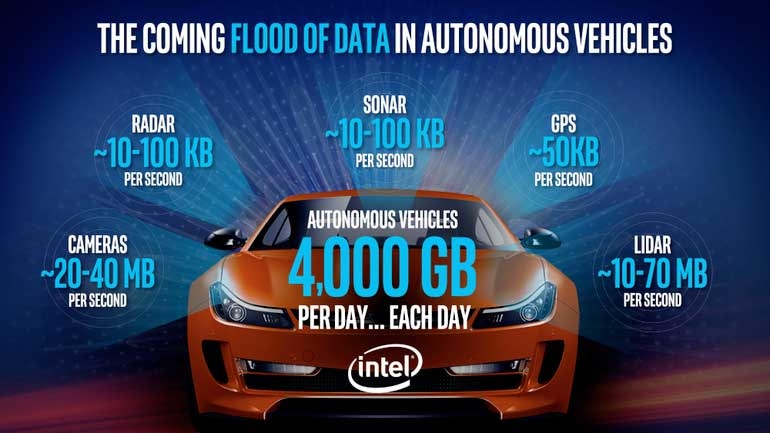
- LiDAR rất tốt để xem ở chế độ 3D và hoạt động tốt trong bóng tối, nhưng không thể nhìn thấy màu sắc. LiDAR có thể phát hiện các vật thể rất nhỏ, nhưng hiệu suất bị suy giảm bởi khói, bụi, mưa và các yếu tố trong khí quyển. Chúng yêu cầu xử lý phía sau ít hơn máy ảnh, nhưng thường đắt hơn.
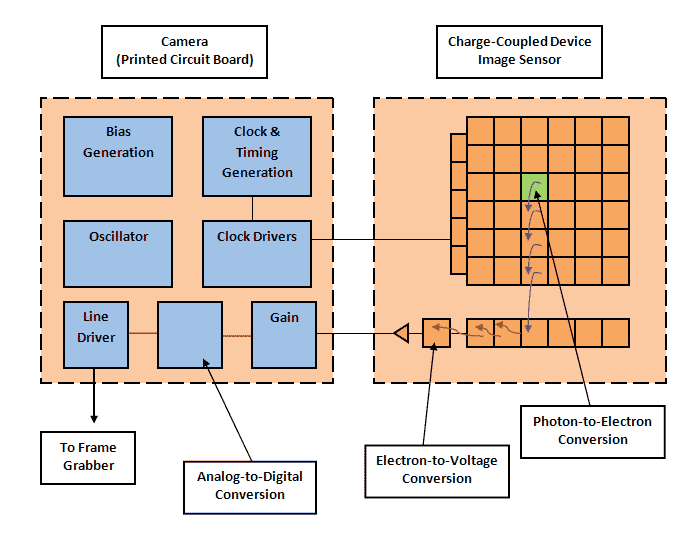
- Camera có thể biết đèn giao thông có màu đỏ, xanh lá cây hay vàng. Chúng rất giỏi trong việc “đọc” các dấu hiệu và nhìn thấy các đường kẻ cùng các dấu hiệu khác. Nhưng chúng kém hiệu quả hơn trong bóng tối hoặc khi bầu không khí dày đặc sương mù, mưa và tuyết. Chúng cũng yêu cầu xử lý nhiều hơn LiDAR.
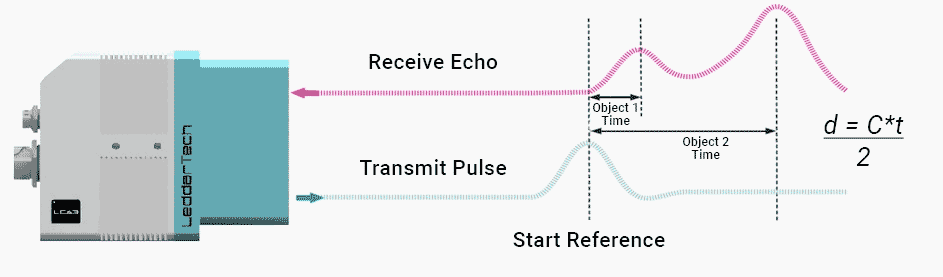
- RADAR có thể nhìn xa hơn trên đường so với các cảm biến đo khoảng cách khác, rất cần thiết cho việc lái xe tốc độ cao. Chúng hoạt động tốt trong bóng tối và khi bầu không khí bị che khuất bởi mưa, bụi và sương mù. Tuy nhiên chúng không thể tạo ra mô hình chính xác như máy ảnh hoặc LiDAR, cũng không phát hiện các vật thể rất nhỏ tốt bằng một số cảm biến khác.
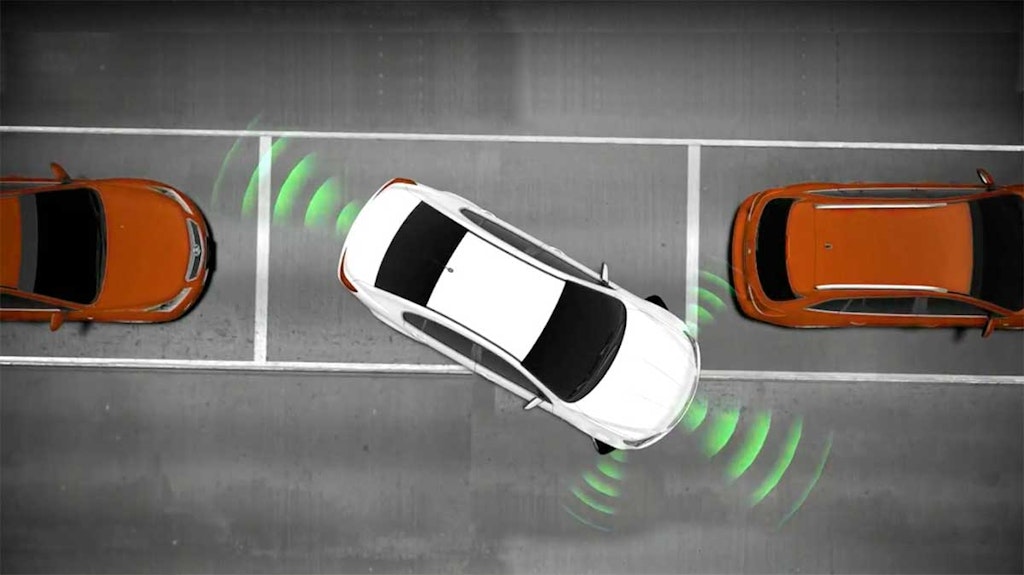
- SONAR rất tốt trong việc đo khoảng cách gần, chẳng hạn như thao tác đỗ xe, nhưng không phù hợp cho các phép đo khoảng cách xa. Chúng có thể bị ảnh hưởng bởi tiếng ồn của gió, vì vậy không hoạt động tốt ở tốc độ xe cao.
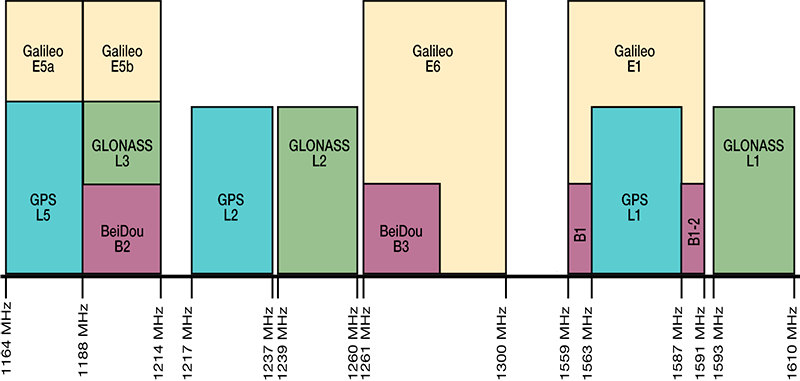
- GNSS, kết hợp với cơ sở dữ liệu bản đồ được cập nhật thường xuyên, rất cần thiết cho việc điều hướng. Nhưng độ chính xác GNSS thô từ một mét trở lên là không đủ để lái xe hoàn toàn tự động, và khi không có tầm nhìn lên bầu trời, chúng hoàn toàn không thể điều hướng. Đối với lái xe tự động, chúng phải được tích hợp với các cảm biến khác, bao gồm IMU và được tăng cường bằng RTK, SBAS hoặc GBAS.
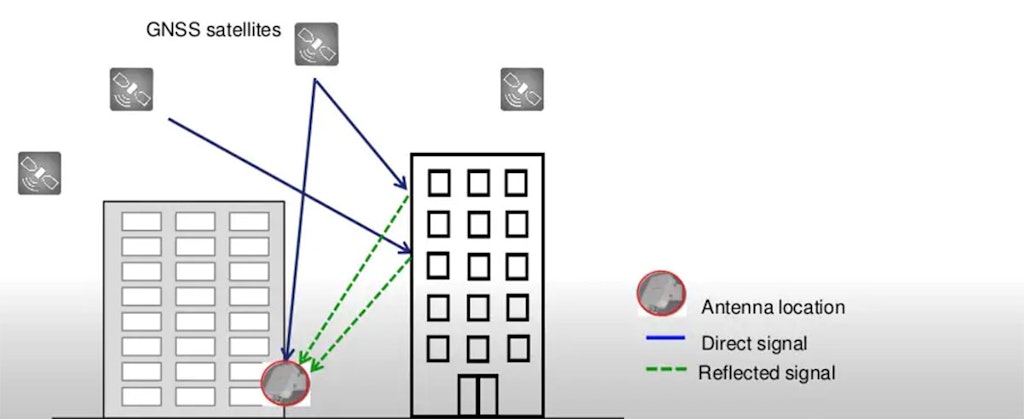
Các hệ thống IMU cung cấp tính toán chết mà các hệ thống GNSS cần khi đường ngắm lên bầu trời bị chặn hoặc bị xáo trộn bởi tín hiệu đa đường trong “hẻm núi đô thị”.
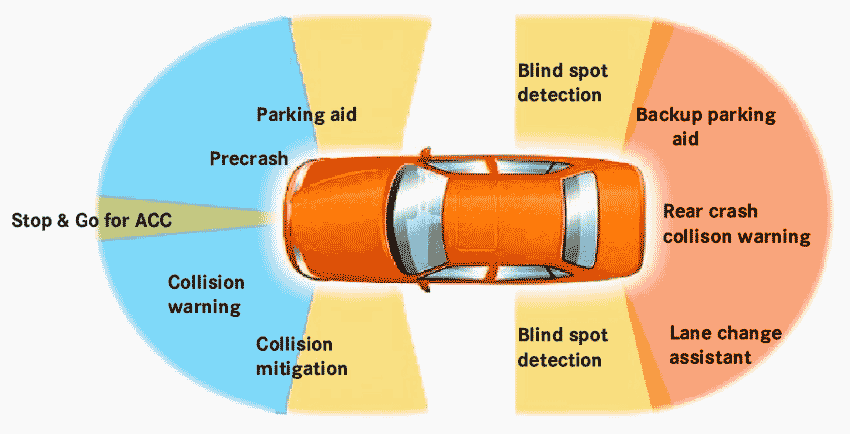
Các cảm biến này bổ sung cho nhau và cho phép bộ xử lý trung tâm tạo ra mô hình ba chiều về môi trường xung quanh xe, để biết phải đi đâu và làm thế nào để đến đó, tuân theo các quy tắc lái xe và phản ứng với những tình huống dự kiến hoặc bất ngờ xảy ra trên mọi con đường và bãi đậu xe.
Nói tóm lại, chúng ta cần tất cả, hoặc cần sự kết hợp của chúng, để đạt được ADAS và cuối cùng là lái xe tự động.
Tóm tắt
Khi bạn còn là một đứa trẻ, bạn có bao giờ nghĩ rằng chiếc xe của gia đình mình sẽ được trang bị RADAR và SONAR như máy bay và tàu ngầm không? Bạn có từng tưởng tượng màn hình phẳng thống trị bảng điều khiển và hệ thống định vị kết nối với vệ tinh trong không gian không? Nghe có vẻ như khoa học viễn tưởng, nhưng ngày nay tất cả những điều đó và hơn thế nữa đều đã trở thành hiện thực.
ADAS là một trong những hướng phát triển quan trọng nhất đang diễn ra hiện nay. Tất nhiên, còn có sự phát triển song song của xe hybrid và xe điện, điều này cũng rất quan trọng trong việc giảm khí nhà kính và sử dụng nhiên liệu hóa thạch. Nhưng ADAS đi thẳng vào khía cạnh quan trọng nhất của du lịch và di chuyển: sự an toàn của con người.
Vì hơn 90% tai nạn đường bộ, thương tích và tử vong là do lỗi của con người, mọi tiến bộ trong ADAS đều có tác dụng rõ ràng và tuyệt đối trong việc ngăn ngừa thương tích và tử vong.